Airborne Wind Energy
Implemented concepts
19 September 2025
Outline
- Classification
- SkySails
- TU Delft
- Kitepower
- Kitenergy
- Toyota
- CPECC
- Wind Fisher
- EnerKíte
- Ampyx Power
- Mozaero
- Kitemill
- TwingTec
- Windswept
- someAWE
- Windlift
- kiteKRAFT
Currently developed commercial prototypes















The classification is based on 14 currently developed commercial prototypes
Several other implemented prototypes, not pursued commercially anymore, are included in the subsequent discussion
| Developer | Prototype name | Electricity generation location | Kite type | Launching & landing concept | Wing span (m) | Wing surface area (m2) | Kite mass (kg) | Min.–max. operation height (m) | Rated power (kW) |
|---|---|---|---|---|---|---|---|---|---|
| SkySails | SKN-PN-14 | ground | soft wing | static mast | 15.6–22a | 90b, 180c | 170d | 200-400 | 200 |
a projected wing span
b projected wing surface area
c flat (laid-out) wing surface area
b projected wing surface area
c flat (laid-out) wing surface area
| Developer | Prototype name | Electricity generation location | Kite type | Launching & landing concept | Wing span (m) | Wing surface area (m2) | Kite mass (kg) | Min.–max. operation height (m) | Rated power (kW) |
|---|---|---|---|---|---|---|---|---|---|
| Kitepower | Falcon | ground | soft wing | winch | 13.3a | 47b, 60c | 73d | 70-400 | 100 |
a projected wing span
b projected wing surface area
c flat (laid-out) wing surface area
b projected wing surface area
c flat (laid-out) wing surface area
| Developer | Prototype name | Electricity generation location | Kite type | Launching & landing concept | Wing span (m) | Wing surface area (m2) | Kite mass (kg) | Min.–max. operation height (m) | Rated power (kW) |
|---|---|---|---|---|---|---|---|---|---|
| Kitenergy | KE60 Mark II | ground | soft wing | winch | 12.5a | 42b, 50c | 100-400 | 60 |
a projected wing span
b projected wing surface area
c flat (laid-out) wing surface area
b projected wing surface area
c flat (laid-out) wing surface area
| Developer | Prototype name | Electricity generation location | Kite type | Launching & landing concept | Wing span (m) | Wing surface area (m2) | Kite mass (kg) | Min.–max. operation height (m) | Rated power (kW) |
|---|---|---|---|---|---|---|---|---|---|
| Toyota | Mothership v11 | ground | soft wing | winch | 8 | 8 | 5.2 | 300-600 | 1 |
| Developer | Prototype name | Electricity generation location | Kite type | Launching & landing concept | Wing span (m) | Wing surface area (m2) | Kite mass (kg) | Min.–max. operation height (m) | Rated power (kW) |
|---|---|---|---|---|---|---|---|---|---|
| CPECC | Airpower | ground | parachute | pilot parachute | 40a | 1256b | 1480 | 500-3000 | 2400e |
a projected parachute diameter
b projected parachute surface area
e rated generator power
b projected parachute surface area
e rated generator power
| Developer | Prototype name | Electricity generation location | Kite type | Launching & landing concept | Wing span (m) | Wing surface area (m2) | Kite mass (kg) | Min.–max. operation height (m) | Rated power (kW) |
|---|---|---|---|---|---|---|---|---|---|
| Wind Fisher | MAG1 | ground | Magnus rotor | winch | 1.7 | 0.32f | 1.0 | 0-50 | 0 |
f rotor diameter × width
| Developer | Prototype name | Electricity generation location | Kite type | Launching & landing concept | Wing span (m) | Wing surface area (m2) | Kite mass (kg) | Min.–max. operation height (m) | Rated power (kW) |
|---|---|---|---|---|---|---|---|---|---|
| EnerKíte | EK30/Enerwing | ground | hybrid wing | HTOL rotating arm | 8-14 | 4-8 | 22.7 | 50-300 | 30 |
| Developer | Prototype name | Electricity generation location | Kite type | Launching & landing concept | Wing span (m) | Wing surface area (m2) | Kite mass (kg) | Min.–max. operation height (m) | Rated power (kW) |
|---|---|---|---|---|---|---|---|---|---|
| Mozaerog | AP3 | ground | hard wing | HTOL catapult | 12 | 12 | 475 | 200-450 | 150 |
g formerly Ampyx Power
| Developer | Prototype name | Electricity generation location | Kite type | Launching & landing concept | Wing span (m) | Wing surface area (m2) | Kite mass (kg) | Min.–max. operation height (m) | Rated power (kW) |
|---|---|---|---|---|---|---|---|---|---|
| Kitemill | KM1 | ground | hard wing | VTOL quad-plane | 7.4 | 3 | 54 | 200-500 | 20 |
| Developer | Prototype name | Electricity generation location | Kite type | Launching & landing concept | Wing span (m) | Wing surface area (m2) | Kite mass (kg) | Min.–max. operation height (m) | Rated power (kW) |
|---|---|---|---|---|---|---|---|---|---|
| TwingTec | Twing (T29) | ground | hard wing | VTOL tri-plane | 5.5 | 2 | 25 | up to 300 | 10 |
| Developer | Prototype name | Electricity generation location | Kite type | Launching & landing concept | Wing span (m) | Wing surface area (m2) | Kite mass (kg) | Min.–max. operation height (m) | Rated power (kW) |
|---|---|---|---|---|---|---|---|---|---|
| Windswept | Kite Turbine | ground | rotary | pilot kite | 6×1h | 6×0.2 | 10 | 1 |
h rotor diameter 4.48 m
| Developer | Prototype name | Electricity generation location | Kite type | Launching & landing concept | Wing span (m) | Wing surface area (m2) | Kite mass (kg) | Min.–max. operation height (m) | Rated power (kW) |
|---|---|---|---|---|---|---|---|---|---|
| someAWE | MAR3 | ground | rotary | pilot kite | 4×1i | 4×0.15 | 0.5 |
i rotor diameter 3.5 m
| Developer | Prototype name | Electricity generation location | Kite type | Launching & landing concept | Wing span (m) | Wing surface area (m2) | Kite mass (kg) | Min.–max. operation height (m) | Rated power (kW) |
|---|---|---|---|---|---|---|---|---|---|
| Kitekraft | SN9 | onboard | box wing | VTOL tailsitter | 2.4 | 1.08 | 32 | 100j | 12 |
j tether length
| Developer | Prototype name | Electricity generation location | Kite type | Launching & landing concept | Wing span (m) | Wing surface area (m2) | Kite mass (kg) | Min.–max. operation height (m) | Rated power (kW) |
|---|---|---|---|---|---|---|---|---|---|
| Windlift | C1 | onboard | hard wing | VTOL tailsitter | 3.8 | 0.95 | 11.3 | 30-100 | 2 |
Applying classification criteria 1-3
| Developer | Prototype name | Electricity generation location | Kite type | Launching & landing concept | Wing span (m) | Wing surface area (m2) | Kite mass (kg) | Min.–max. operation height (m) | Rated power (kW) |
|---|---|---|---|---|---|---|---|---|---|
| SkySails | SKN-PN-14 | ground | soft wing | static mast | 15.6–22a | 90b, 180c | 170d | 200-400 | 200 |
| Kitepower | Falcon | ground | soft wing | winch | 13.3a | 47b, 60c | 73d | 70-400 | 100 |
| Kitenergy | KE60 Mark II | ground | soft wing | winch | 12.5a | 42b, 50c | 100-400 | 60 | |
| Toyota | Mothership v11 | ground | soft wing | winch | 8 | 8 | 5.2 | 300-600 | 1 |
| CPECC | Airpower | ground | parachute | pilot parachute | 40a | 1256b | 1480 | 500-3000 | 2400e |
| Wind Fisher | MAG1 | ground | Magnus rotor | winch | 1.7 | 0.32f | 1.0 | 0-50 | 0 |
| EnerKíte | EK30/Enerwing | ground | hybrid wing | HTOL rotating arm | 8-14 | 4-8 | 22.7 | 50-300 | 30 |
| Mozaerog | AP3 | ground | hard wing | HTOL catapult | 12 | 12 | 475 | 200-450 | 150 |
| Kitemill | KM1 | ground | hard wing | VTOL quad-plane | 7.4 | 3 | 54 | 200-500 | 20 |
| TwingTec | Twing (T29) | ground | hard wing | VTOL tri-plane | 5.5 | 2 | 25 | up to 300 | 10 |
| Windswept | Kite Turbine | ground | rotary | pilot kite | 6×1h | 6×0.2 | 10 | 1 | |
| someAWE | MAR3 | ground | rotary | pilot kite | 4×1i | 4×0.15 | 0.5 | ||
| Kitekraft | SN9 | onboard | box wing | VTOL tailsitter | 2.4 | 1.08 | 32 | 100j | 12 |
| Windlift | C1 | onboard | hard wing | VTOL tailsitter | 3.8 | 0.95 | 11.3 | 30-100 | 2 |
a projected wing span
b projected wing surface area
c flat (laid-out) wing surface area
d excluding tether, but including suspended kite control unit and bridle line system
e rated generator power
b projected wing surface area
c flat (laid-out) wing surface area
d excluding tether, but including suspended kite control unit and bridle line system
e rated generator power
f rotor diameter × width
g formerly Ampyx Power
h rotor diameter 4.48 m
i rotor diameter 3.5 m
j tether length
g formerly Ampyx Power
h rotor diameter 4.48 m
i rotor diameter 3.5 m
j tether length



Classification scheme



Power Curve SKN-PN-14

Released March 22th 2024
System components




Vlugt et al. (2019)
Pumping kite concept


Vlugt et al. (2013)
Pumping cycle operation - simulation

Fechner (2016)
Power curve - simulation



Fechner (2016) p. 166
& 181
V3 kite






Oehler and Schmehl (2019)
Control bridle layout in flight


Left
actuation loopRight actuation loop
Max Dereta
Kite control unit
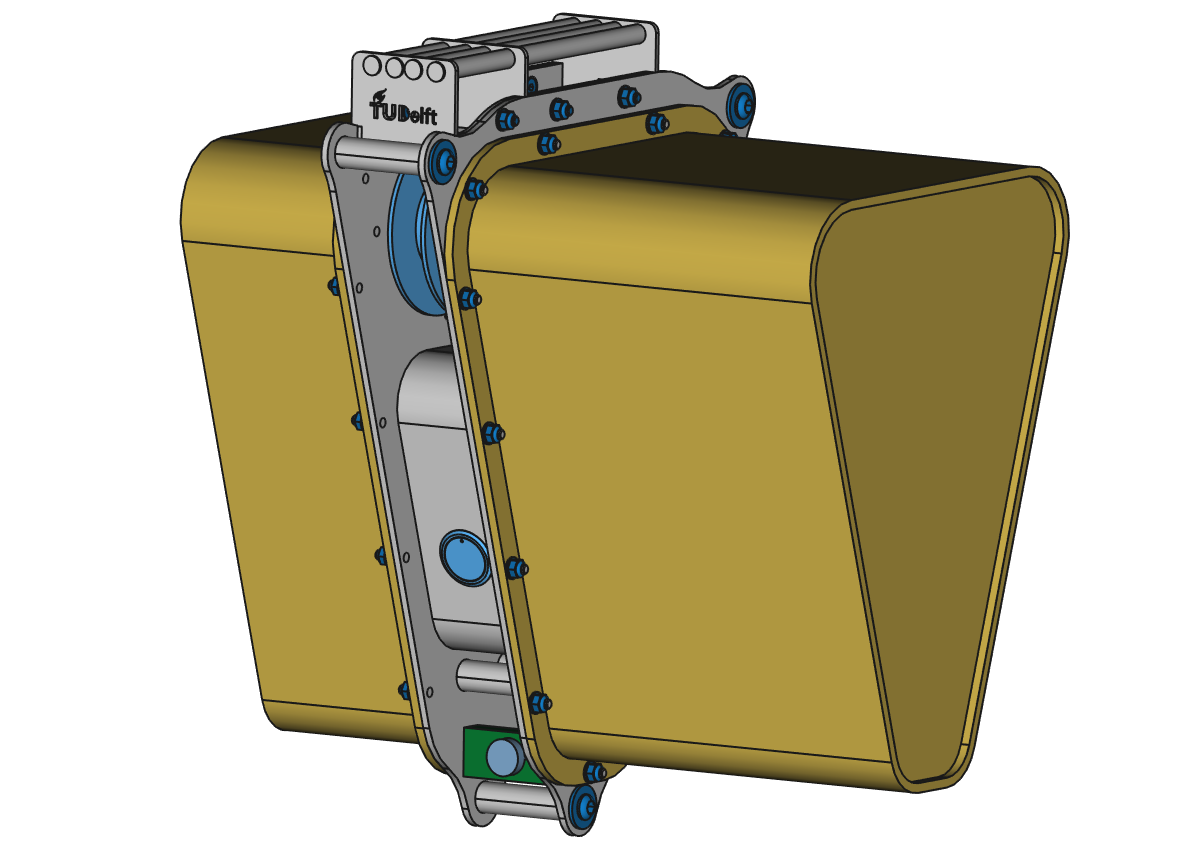
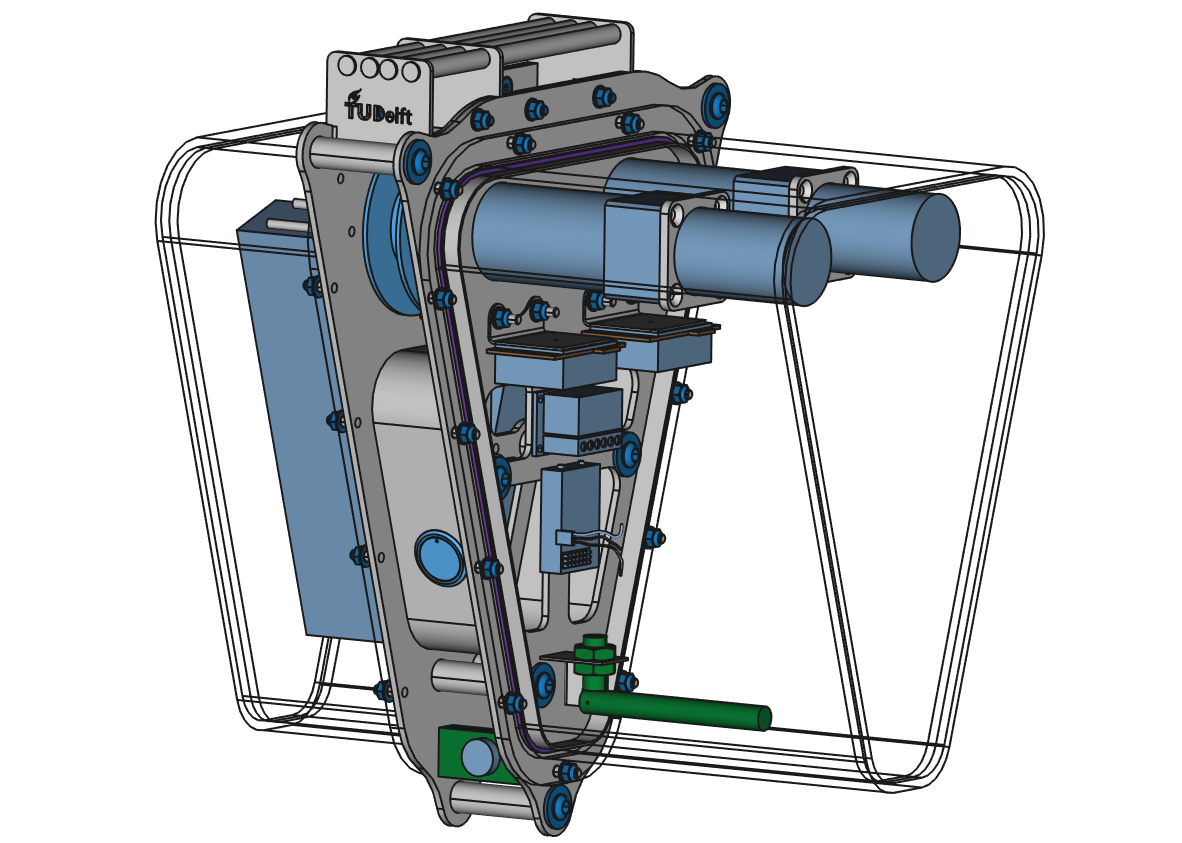
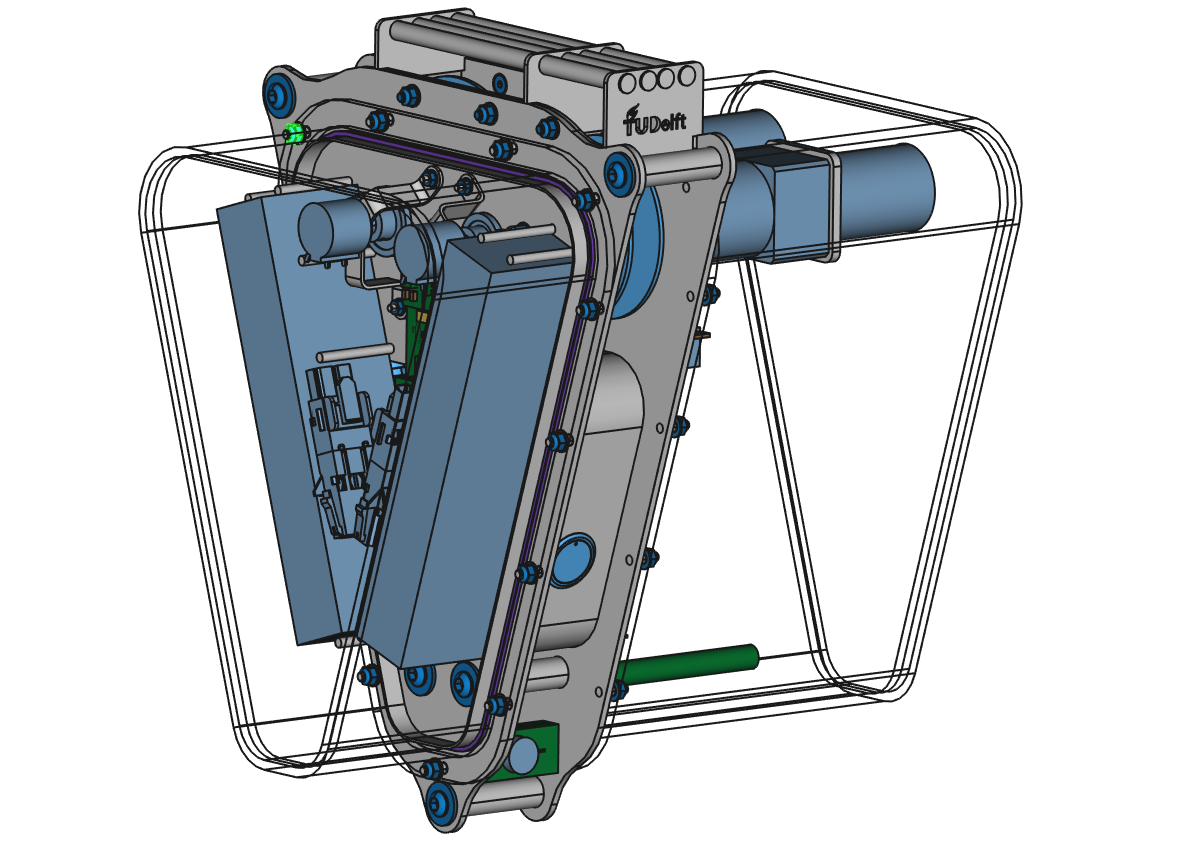
Features:
Shock- and
water-proof casing (shown without extra foam padding)
Two separate micro
winches for depowering and steering
Depower winch
includes piston brake
Onboard computer and
wifi antenna
Rechargeable
batteries for >2h flight
Angular encoders to
measure tape actuations
V3 kite control


V3 kite control during launching and landing
End point of depower tape is marked.

Powered

Depowered

Depowered & steering
Oehler and Schmehl (2019)
Mast-based launching and landing



TU Delft V3 kite on 25 October 2012.
Pulley mechanism



Pulley mechanism to retain the tether at the circular rail (left),
gradual release of the retaining pulley (center and right)
Operational zones

Salma et al. (2019)
Onboard wind turbine

Diehl et al. (2017)
Kite Turbine
